

Projekt-Beschreibung:
Windows Steuersoftware für eine 3-achsige Positioniereinheit um Messobjekte an einem Messplatz schnell und präzise zu positionieren.
Aufgaben:
– Anbindung an CAN-Bus via Ixxat CAN Interfaces + VCI Treiber
– Entwicklung CANOpen Modul zur Ansteuerung Copley Xenus
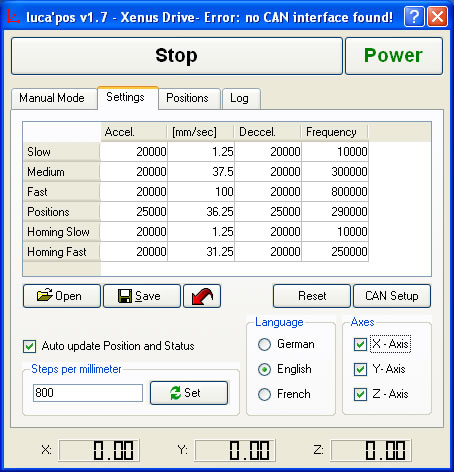
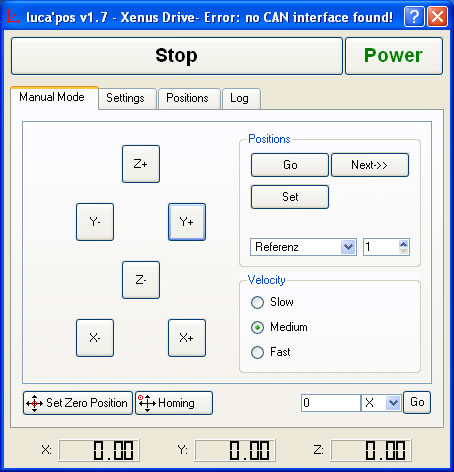
– Abbildung der 3-achsigen Motor Steuerung in Anwendung + GUI
– Konfiguration von Motor und CAN Parametern
– Setzen, Laden, Speichern von Positionen
Technologien:
CAN, CANOpen, Ixxat VCI CAN Interface, Xenus Motor-Controller
Werkzeuge u. Bibliotheken (API):
Visual C++ 2003, QT3, QWT, CVS , NSIS
Projekt-Umfang:Â ca. 2 Monate